

In 33rd meeting the crm - sig discussed about more specific in CRMarcheo, Martin comment: physical feature IsA Place ?… question to discuss. In CRMSci this move has been made and creates inconsistency between CRMsci and CRMcore.
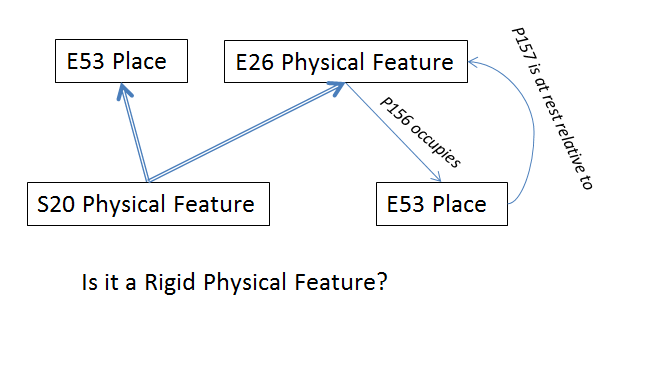
Figure Physical feature
Comments to the above figure were:
p156 occupies, a thing may or may not occupy a place. If it does then it is a unique place. This place is p157 defined relative to the Physical Feature
If we can assume that for a physical feature we can always have a frame, then we can have a 1 to 1 relation. So we can say that the physical feature is associated with the place
Do all things that we regard as physical features (requires relative stability of form or have such a stability of form, that we can define on geometry for all its existence then it would always be at the same place.
Then a proposal of possible ‘Rigid Physical Feature’ for S20 came out. This is necessary for archaeological stratigraphic unit (needs stability of matter condition). So we could make S20 subclass of E26 (not equivalent).
Ie we cannot say of all E26 Feature that there is this rigidity feature, but we could do so for S20
Martin 1/8/2016
In the 36th joined meeting of the CIDOC CRM SIG and ISO/TC46/SC4/WG9 and the 29th FRBR - CIDOC CRM Harmonization meeting, the crm-sig assigned to MD to write a scope note and to change the label
Heraklion 1/8/2016
Posted by Martin on 24/8/2016
Dear All,
Here my attempt at a scope note for CRM Sci, please comment!!:
Minutes:
CRM archaeo -Issue 282
In 33rd meeting the crm - sig decided that since EH-CRM is more specific while CRMarcheo is more general Achille should send communicate with Keith for mapping CRMarcheo and EH – CRM.
Martin comment: physical feature IsA Place ?… question to discuss. In CRMSci this move has been made and creates inconsistency between CRMsci and CRMcore.
Figure 4 Physical feature
Comments to the above figure were:
p156 occupies, a thing may or may not occupy a place. If it does then it is a unique place. This place is p157 defined relative to the Physical Feature
If we can assume that for a physical feature we can always have a frame, then we can have a 1 to 1 relation. So we can say that the physical feature is associated with the place
Do all things that we regard as physical features (requires relative stability of form or have such a stability of form, that we can define on geometry for all its existence then it would always be at the same place.
Then a proposal of possible ‘Rigid Physical Feature’ for S20 came out. This is necessary for archaeological stratigraphic unit (needs stability of matter condition). So we could make S20 subclass of E26 (not equivalent).
Ie we cannot say of all E26 Feature that there is this rigidity feature, but we could do so for S20.
This discussion forms new issue.
The crm-sig assigned to MD to write a scope note and to change the label
My text
S20 Rigid Physical Feature
Subclass of: E26 Physical Feature
E53 Place
Superclass of: E27 Site
S22 Segment of Matter
Equivalent to: E26 Physical Feature (CIDOC-CRM)
Scope Note: This class comprises instances of E26 Physical Feature that are rigid enough throughout their existence and in their position to the surrounding matter bearing them so that a unique geometric reference space can be fixed on them in which they do not move or turn. Examples are built structures, features of marble statues or machinery. Counterexamples are things like the Red Spot on Jupiter or the structures within an amoeba. Mountains may be regarded as instances of S20 Rigid Physical Feature, if the time-scale of the intended documentation in is clearly restricted to historical times. The geometric reference system may dynamically be defined so that certain kinds of deformations over time are invariant under it, for instance in order to be fixed on an elastic structure, such as an airplane in flight, or to be invariant under geological compression processes, such as the flattening of dinosaur bones, which allows for reconstructing the original 3D shape. We still regard features that are invariant in such deforming reference spaces as rigid.
We model S20 Rigid Physical Feature to be a subclass of E26 Physical Feature and of E53 Place. The latter is intended as the phenomenal place it occupies with respect to the surrounding matter as defined in CRMgeo (Doerr and Hiebel 2013). More precisely, it is the maximal volume in space that an instance of S20 Physical Feature is occupying during its existence with respect to the default reference space relative to which the feature is at rest. By virtue of this multiple inheritance we can discuss the spatial extent of an S20 Rigid Physical Feature without representing each instance of it together with an instance of its associated spatial extent. This model combines two quite different kinds of substance: an instance of S20 Rigid Physical Feature is matter while an instance of E53 Place is an aggregation of points in a geometric reference space. However, since this spatial extent of an instance of S20 Rigid Physical Feature, due to its rigidity, is regarded to be unique to it with respect to its particular reference space, its identity and existence depends uniquely on the identity of the instance of E18 Physical Thing. Therefore this multiple inheritance is unambiguous and effective and furthermore corresponds to the intuitions of natural language.
For the period of existence of an instance of E26 Rigid Physical Feature, its own reference space may coincide with a reference space of a larger surrounding matter of its bearing object of longer existence. For instance, in cases of features on or in the surface of earth, the default reference space is typically fixed to the closer environment of the tectonic plate or sea floor. In cases of features on mobile objects, the reference space is typically fixed to the geometry of the bearing object. To identify the place where an instance of E26 Rigid Physical Feature will be or has been with respect to a surrounding matter beyond its period of existence is a question of geometric mapping of the respective reference spaces.
Examples:
§ the temple in Abu Simbel before its removal, which was carved out of solid rock
§ Albrecht Duerer's signature on his painting of Charles the Great
§ the damage to the nose of the Great Sphinx in Giza
In the 37th joined meeting of the CIDOC CRM SIG and ISO/TC46/SC4/WG9 and the 30th FRBR - CIDOC CRM Harmonization meeting, the crm-sig accepted the change of the label of S20 Physical Feature to S20 Rigid Physical Feature and made changes to the defintion of the class. The new comments of the discussion is here. HW is assigned to SS and MD for reworking on syntax and consistency.
Berlin, December 2016
Posted by Steve on 5/4/2017
Old S20 paragraph 2
Due to this stability of form, the maximal real volume in space that an instance of S20 Rigid Physical Feature occupies at some time within its existence with respect to the default reference space relative to which the feature is at rest defines uniquely a place for the feature with respect to its surrounding matter.
Revised S20 paragraph 2
Due to this stability of form, the maximal volume in space that an instance of S20 Rigid Physical Feature occupies at some time uniquely defines a place for the feature with respect to its surrounding matter. This is only true in respect to the default reference space relative to which the feature is at rest.
In the 38th joined meeting of the CIDOC CRM SIG and ISO/TC46/SC4/WG9 and the 31st FRBR - CIDOC CRM Harmonization meeting, the crm-sig accepted the proposed changes by Steve about the second paragraph of scope note of S20.
The issue is closed
Heraklion, April 2017