
posted by Athinak on 13/7/2018
In CRMsci, we need a reference to the measurements of the positions of things, in terms of place geometries that are measured and calculated by this kind of activities. So, a first idea is to extend the model to include a Measurement Position Activity that produces a geometric place definition in gml terms (which also may include the place of the possible sampling activities).
So, a proposal for a new class:
“Position Measurement”
Subclass of: S21 Measurement/S3 Measurement by Sampling
Scope note:
This class comprises activities of measuring the positions of instances of E2 Temporal Entity or E77 Persistent Items, (properties of physical things, or phenomena, states and interactions or events), e.g during a sampling activity, that can be determined by a systematic procedure.
During a Sampling Event that takes place, the scientist in order to collect samples and observe the occurrences (encounter events) in the specific area, keeps the information about the area of sampling by a number of measurements. By these area measurements, also encounter events volumes can be calculated. Furthermore, the volume of the sampling event can also be calculated.
All these related processes can be modelled by a Position Measurement activity that produces a Geometric Place Definition, which includes the Phenomenal Place in which the Sampling Activity took place.
Properties: produces: Geometric Place Definition?/or SP5 Geometric Place Expression: Q10 defines place: SP6 Declarative Place
In the 43rd joint meeting of the CIDOC CRM SIG and ISO/TC46/SC4/WG9; 36th FRBR - CIDOC CRM Harmonization meeting, the sig reviewed the new class proposed by AK Position Measurement and accepted it as a starting point. However, it was proposed that the class be a subclass of S3 Observation rather than an S21 Measurement OR S3 Measurement by Sampling.
Furthermore, it was suggested (MD) that the definition of this class be cast as a situation measurement instead (i.e. that it should generalize to both space and time). It should measure phenomenal places that have acquired their identity through some observation event, while providing approximations for these phenomenal places. Finally, it should carry over to measuring the time of observation events.
HW: AK to revisit bearing in mind the sig’s comments.
Heraklion, MArch 2019
Posted by Martin on 1/6/2019
Dear All,
Here my proposal for the position measurement. I believe we need a third special kind of measurement, something like a "spot measurement", which would provide properties within a continuum, such as atmosphere, river, ground, or sensors immersed in an object.
Sxxx Position Measurement
Subclass of: E16 Attribute Assignment
Scope note: This class comprises activities of measuring the positions of instances of E18 Physical Thing in space and time. The position is given as an E94 Space Primitive corresponding to a declarative place approximating the intended real position and the time of the measurement itself. The measured thing may either be the measurement device itself, such as a theodolite or GPS device, a permanent survey mark, a volume containing an E18 Physical Thing or an arbitrary spot on or within an E18 Physical Thing. The respective position and time may be used to document the presence of an E18 Physical Thing at some time or indirectly the presence of an instance of E4 Period, in particular events of scientific observation and their spatial focus.
Properties:
Oxx1 determined position (was determined by): E94 Space Primitive
Oxx2 covered thing: E18 Physical Thing
Oxx3 covered event: E4 Period
Oxx4 fell within thing: E18 Physical Thing
Oxx5 fell within event: E4 Period
The idea being, that the “covered thing” was completely present within the given space and time.
If we would talk only about spacetime volumes, this could not be expressed.
To be checked how to connect to sampling spots within the volume of a measurement activity.
In the 44th joint meeting of the CIDOC CRM SIG and ISO/TC46/SC4/WG9; 37th FRBR - CIDOC CRM Harmonization meeting, the sig was inconclusive regarding the proposed new class Sxxx Position Measurement and its incoming/outcoming properties. It was mentioned that it is not clear how this class is a subclass of E13 Attribute Assignment/E16 Measurement.
DECISION: MD should provide more information, including the intension of the class and its properties plus a number of relevant examples (HW).
Paris, June 2019
Posted by Martin on 20/2/2020
Compatibility with Attribute Assignment:
Oxx2 covered thing, Oxx3 covered event: E4 Period, Oxx4 fell within thing: E18 Physical Thing, Oxx5 fell within event: E4 Period all are subproperty of assigned to
Oxx1 determined position (was determined by): E94 Space Primitive = subproperty of assigned
I can try a FOL....
In the 48th joint meeting of the CIDOC CRM SIG and ISO/TC46/SC4/WG9; 41st FRBR-CIDOC CRM Harmonization Meeting; the sig decided to review the scope note for the class, produce scope note for the properties, come up with examples for both the class and its properties from multiple fields/domains/ use cases to show its utility and where to put the determination of the coordinate system.
HW Assigned to MD, GH, TV, plus AK & CB –with data from Sarrís’ system
October 2020
Posted by Martin on 1/03/2021
Dear All,
I revise my previous proposal for measuring positions:
Any position measurement is based on triangulation with multiples distances to reference points and angle measurements. GPS measures distances to satellites. Distances are Dimensions. If directed distances use georeferenced directions, i.e. angle to the rotation axis of earth, etc. angles are again dimensions. Hence, a position measurement is an evaluation of a combination of multiple associated distance and angle measurements from a particular spot to certain reference points of known position in the same reference space. If stars are used, they constitute (extremely) distant reference points. Gravity and Earth Magnetic Field also provide reference directions for angle measurements that do not need a second reference point. Classical longitude measurements use temporal simultaneity of a common event with a reference location, which evaluates to an angle. All methods are fairly complex, but the details are a standard routine or even hidden in a modern GPS module.
Therefore we argue that position measurement is a specific (composite) observation which results in a position expression, but the constituent dimensions may or may not be documented.
Hence, P40 observed dimension (was observed in): E54 Dimension may not be instantiated.
All position measurements are approximations of other places. Therefore, they result in a declarative place defined by an E94 Space Primitive. Since in general we talk about moving reference spaces, moving things and evolving processes, the time of measurement is essential. We take it either to be the time-span of the measurement, or a narrower time-span which covers the contributing time-critical observations. In essence, this defines a declarative spacetime box (volume), which again is an approximation. It appears to me that such an approximation would normally be used to determine parts of the extent of some instance of Presence by overlap, coverage or containment.
Sxxx Position Measurement
Subclass of: E16 Attribute Assignment
Scope note: This class comprises activities of measuring positions in space and time. The measured position is intended to approximate a part or all of the extent of the presence (instance of E93 Presence) of an instance of E18 Physical Thing or E4 Period of interest, such as the outer walls of an excavated settlement, the position of a ship sailing or the start and end of athlete’s run in a competition. Characteristically, a theodolite or GPS device may be positioned on some persistent feature. Measuring the position of the device will yield an approximation of the position of the feature of interest. Alternatively, some material item may be observed moving through a measured position at a given time.
A position measurement is an evaluation of a combination of measurement of multiple associated distances and/or angles (instances of E54 Dimension) from a particular spot to certain reference points of previously known position in the same reference space. Often, the observed constituting dimensions are not documented, or hidden in an electronic device software.The measured position is given as an E94 Space Primitive corresponding to a declarative place. Together with the measured time-span covering the time-critical observations it forms a spacetime volume, which should normally overlap with the spatiotemporal extent of the thing or phenomenon of interest.
Properties:
Oxx1 determined position (was determined by): E94 Space Primitive
Oxx2 has validity time-span (is position validity for): E52 Time-Span
We may now formulate the approximation to the things of interest, e.g.
Oxx3 overlaps with presence: E93 Presence.
But the time=span of this presence is already implicit in the time-span of validity.
If we use:
Oxx3 overlaps with presence of: XXXX, we need a property for E18 and another for E4…
Another use case is when someone wants to determine if she is at a particular declarative place: Fisherman now mark positions in the sea with GPS, in order to return to the same spot...
--------------------------------------------
Opinions?
To be discussed!
Posted by Øyvind on 5/03/2021
Dear Martin,
I am considering a possible practical counter-example from my own manual measurement experience. I am not sure if it is relevant but maybe the first sentence (”Any position measurement is based on triangulation with multiples distances to reference points and angle measurements”) should be modified.
I am mapping the location of a boulder. Using a compass and my steps, fairly well calibrated to one meter, I measure the distance and direction from my fix point, in this case the spot where a creek is crossing a path.
The fix point itself is established through stereo aerial photography and thus, based on a sort of triangulation. But my measurement from the fix point and the boulder is based on the distance and direction from the single fix point.
Maybe it makes sense to still call this a triangulation as the compass shows the direction to the magnetic north.
Whatever can be argued about this, maybe it makes sense to add to the GPS descriptions a bit more on analogue measurement practices? They were the basis for a massive amount of museum and cultural heritage documentation.
Posted by Martin on 5/03/2021
Dear Øyvind,
Indeed I'd call this still a form of triangulation. If you determine the relative position by (Dx,Dy), you create a rectangular triangle, with your distance walked being the hypotenuse.
If you have a nice proposal text to add, welcome! So far, I think I have covered analogue practices.
Posted by Øyvind on 6/03/2021
Dear Martin,
it makes sense to me. I will try to formulate something and thus find out if I actually think something is missing.
Posted by Gerald Hiebel on 8/03/2021
Dear Martin and all,
thanks for taking this forward and the suggested proposition, which defines the process very well.
One question I have is how to relate the Position Measurement to the measured object (E18 or S10).
I believe the E93 Presence is the correct way for it, but we may run into a problem, as E18 is no longer a subclass of E92 and therefore not of E93.
For implementation simplicity a shortcut to a measured object in the form of a specific property would be nice, or could we use O24 measured ?
If so, should we make Position Measurement a subclass of O21 Measurement and maybe include an example that shows the modelling.
But maybe I did not see an obvious solution.
Posted by Martin on 8/03/2021
Dear Gerald,
Yes, this should be subclass of O21 Measurement. We need further elaboration about how measurements relate to the approximation of things of interest. I found this to be quite diverse, and adding to this class a repetition of all topological relations confusing. E18 still has a Presence directly related.
Posted by Gerald Hiebel on 8/03/2021
Dear Martin,
thanks for the feedback and pointing me to P196 relating the E18 to E92. I missed that one, now the Presence works fine for E18.
Looking forward the discussion,
Posted by Martin on 1/6/2021
(considered together with issue 293 and issue 531)
About the Immediacy of Observation
In all philosophy of science, at least since Kant, there is the clear distinction between the physical interaction in the sensory organ or instrument, the mediating instrument such as a microscope or telescope, and the physical process at the source we intend to observe.
More current philosophical theories, such as by James Ladyman and others, reject the former distinction that observables are only things that can be recognized by human unaided senses, and regard adequate devices as equivalent. In the CRM, we defend the latter position. Ladyman stresses that the assessment of the reality of an observation by instrument is more reliable when its design (and the experience with it) is not made and restricted to recognize the claimed observation only, such as yardsticks, microscopes, Voltmeters, Oscilloscopes etc.
Nevertheless, we have to consider the spatial distance between the source and the sensor, the temporal delay between sensing and reading (observing) the sensor itself, the evaluation of the sensory data following the hypothesis of the instruments operation and the interpretation of the process causing the signal or reaction.
Consider looking at a distant galaxy versus at a bird through a telescope. Consider seeing a lightning versus a supernova through a telescope. Consider reception and evaluation of a seismic signal, isolating an event and identifying it with other signals of the network. Consider traces partly molten ceramics in an archaeological excavation (indicating a temperature) versus ceramics cones made for temperature measuring by their partial melting.
Obviously, there are good reasons to include in an instance of observation or measurement the whole reasoning chain until the cause of the signal, e.g., a rare bird flying by, and in other cases to split the activity into source, signal, signal reception, signal recognition and overall interpretation. The reasons may depend on the immediacy of observation and the confidence in the method to detect the observed kind of cause for the signal. Our models should be able to represent both views in a monotonic way. For instance, observing a chemical reaction can be regarded as part of observing/measuring a concentration of a pollutant.
The following is an example of for including in the meaning of a particular kind of measurement the standard evaluation procedure to a result that, in the narrower sense, is not of observable kind, i.e., position measurement. From this, I propose to create a more general class of measurement and observation, which includes spatiotemporal relations between objects and events, and counting.
Post by Martin (9 May 2022)
Dear All,
Please find my homework (thoughts) for issue 583 (Observable Situation etc.), including 388 (Position
Measurement) under:
In the 53rd CIDOC CRM & 46th FRBRoo SIG meeting, MD presented HW:
- Proposal to introduce a new class Sxxx Position Measurement (isA S4 Observation).
- Proposal for a new property (Oxx observed situation) to connect it with Sxxx Observable Situation.
Nb. In due course O8, O9, O16 would be replaced by the new property Oxx observed situation.
Discussion:
The difference of E16 Measurement and Sxxx Position Measurement is that E16 measures only one thing, Sxxx Position Measurement does not measure the property of a single thing, nor the positions of multiple things but distances.
GH has many data in support of this modelling construct. It was not incorporated in CRMgeo because the intention was to have it in CRMsci from the beginning. CRMgeo defines the output of the process, not the process itself.
Decision: The scope note of Sxxx Position Measurement to be paired with a diagram that illustrates how it should be used.
HW: TV, MD & GH to draw a diagram representing that uses this modelling construct to illustrate how the measurement of a position with respect to a reference system can only be adequately described like that, and where CRM fails unless this construct is admitted. F.i. an instance of E54 Dimension measured through an E16 Measurement is one thing, the position is not a dimension to be measured –it is a distance. That will be provided in an example.
May 2022
Post by Martin Doerr (13 July 2022)
Dear All,
With the help of Thanasis, here a refined version of Issue 388, plus graphics.
Position measurement consists of triangulation, either with two more things, or one thing and a direction from it. GPS is multiple triangulation with Greenwich and the rotational axis of earth as ref frame. Normally, directions are defined by two things present.
So, position measurement is multiple measurements of an observable situation and implicit evaluation of the coordinates relative to the ref frame.
Basically, the position measurement makes sense as a declarative place within the presence of a thing or event at the time of measurement, or covering it. "overlaps" may be precise enough.
NEW:
Sxx1 Position Measurement
Subclass of: S4 Observation
Scope note: This class comprises activities of measuring positions in space and time. The measured position is intended to approximate a part or all of the extent of the presence (instance of E93 Presence) of an instance of E18 Physical Thing or E4 Period of interest, such as the outer walls of an excavated settlement, the position of a ship sailing or the start and end of athlete's run in a competition. Characteristically, a theodolite or GPS device may be positioned on some persistent feature. Measuring the position of the device will yield an approximation of the position of the feature of interest. Alternatively, some material item may be observed moving through a measured position at a given time.
A position measurement is an evaluation of a combination of measurement of multiple associated distances and/or angles (instances of E54 Dimension) from a particular spot to certain reference points of previously known position in the same reference space. A particular role is played by the Earth's magnetic field and rotational axis as reference for an angle or direction. Often, the observed constituting dimensions are not documented, or hidden in an electronic device software.The measured position is given as an E94 Space Primitive corresponding to a declarative place. Together with the measured time-span covering the time-critical observations it forms a spacetime volume, which should normally overlap with the spatiotemporal extent of the thing or phenomenon of interest.
Properties:
- Oxx1 determined position (was determined by): E94 Space Primitive
- Oxx2 has validity time-span (is position validity for): E52 Time-Span
- Instead of: "Oxx3 overlaps with presence: E93 Presence."
- Define:
- Oxx3 measured position of (was located by): S15 Observable Entity
- Observable Situation. Oxx5 forms part of (consists of) : Observable Situation
In FOL:
- Sxx1(x) ⇒ S4(x)
- Oxx1(x,y) ⇒ Sxx1(x)
- Oxx1 (x,y) ⇒ E94(y)
- Oxx3(x,y) ⇒ Sxx1(x)
- Oxx3 (x,y) ⇒ S15(y)
- Sxx1(x) ⇒ (∃y,z) [E94(y) ∧ S15(z) ∧ Oxx1 (x,y) ∧ Oxx3 (x,z)]
(Oxx1 determined position and Oxx3 measured position of are necessary properties)
- Oxx2(x,y) ⇒ Sxx1(x)
- Oxx2(x,y) ⇒ E52(y)
- Oxx3 (x,y) ⇒ (∃z,u,v,w) [E93(z) ∧ P195(z,y) ∧ E52(w) ∧ Oxx2(x,w) ∧ P164(z,w) ∧ E94(v) ∧ Oxx1(x,v) ∧ E53(u) ∧ P161(z,u) ∧ P121(v,u)]
"There exist a presence (E93) of the positioned entity at the time of measurement (E52) that has a spatial projection (E53) overlapping with the measured position (E94)"
I add graphics and a real life example measuring a piece of real estate with traditional instruments (They did exist!!).
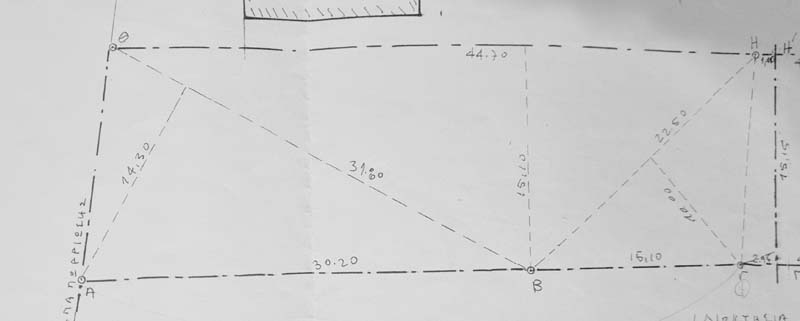{kind=link}
-------------------------------------------------------------------------------
What needs now to be spelled out is the direct measurement of distances, angles and differences of dimensions of things, such as weights on a balance.
We can think of a "Sxx2 Relative Dimension", IsA E54 Dimension,
With property:
Oxx6 is relative to: S15 Observable Entity, subproperty of O12i has dimension (is dimension of),
Quantification (2:2,0:n).
That will not cover angles, because we need 3 reference points. Actually, one is the position of the instrument. If we allow Oxx6 to be more general in quantification, a further specialization would allow for defining
- Sxx3 Angle, IsA Sxx2 Relative Dimension and
- Oxx7 has vertex: S15 Observable Entity, subproperty of Oxx6 is relative to
Then, we can define how the auxiliary measurements are combined into a position measurement.
Opinions?
Best,
Martin
In the 54th CIDOC CRM & 47th FRBR/LRMoo SIG Meeting, the SIG reviewed HW by Martin Doerr and Thanasis Velios.
An outline of the HW can be found below, details in the attached document:
- new proposal for a definition of Sxx1 Position Measurement isA S4 Observation and set of properties that use it (details in the appendix)
- diagram showing the modelling constructs that Position Measurement forms part of.
- use case that illustrates instance of the modelling construct (how to deal with measuring from known positions –especially relevant for historical documents)
Nb. The diagram can be found here in an editable form.
Discussion points:
Difference btw Oxx2 has validity timespan and the inherited properties relating activities to their timespan: a condition (like in S19 Encounter Event) that the validity timespan must be included in the timespan that the measurement was performed.
Decision:
The new class has been voted in, no negative votes.
Start a new issue to discuss the properties for Position Measurement.
Start new issue for the diagrams (and text descriptions) in the introduction section.
Issue closed